Design Parameters Revisited!
Greetings in the year 2024, and a warm welcome back to our readers!
As we embark on this new year, we take a moment to reflect on our recent advancements in aircraft design and set the stage for upcoming developments.
Preceding the turn of the year, a significant achievement was made with the successful integration of sensors into the flight controller. During motor testing, a rapid transition from 0 to 100 occurred, highlighting a learning experience in the process.
Henceforth, this website will serve as a comprehensive build log for MTE 482. Following Professor Bedi’s sabbatical, Professor Michael Mayer has assumed the role, and we eagerly anticipate the insights Professors Mayer and Smith will bring as we acquaint them with our project.
The software team devoted considerable effort over the winter break to delve into the intricacies of the computer vision architecture’s backend. An essential aspect of this endeavor involved determining the most suitable computation mode for the Jetson model. Three distinct modes were examined: TensorrtExecutionProvider, CPUExecutionProvider, and CUDAExecutionProvider. Initial trials with TensorrtExecutionProvider proved impractical due to prolonged processing times and significant memory allocation within the Jetson. This allocation is suboptimal, considering the Jetson’s shared resources with other critical systems, such as control messages for motor operation. Subsequently, the other two providers were tested, and their respective graphs are displayed below for your reference.
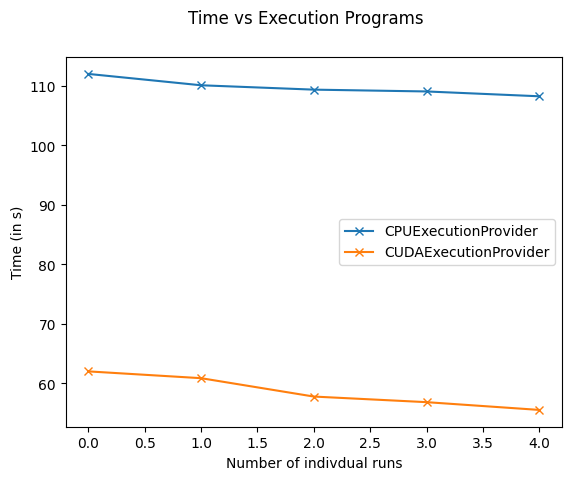
We can see in the above graph that the CUDAExecutionProvider is much faster than CPUExecutionProvider. Hence, this was set as the main execution mode for the computer vision model.
For the build side of things, the initial order for the first prototype was sent off. As of this moment, there the package has left China!
Stay tuned to see our first prototype after the parts arrive!