Brainstorm
Problem Statement
Remote infrastructure in sparsely-populated regions are hard-to-reach by technicians, making inspection and repair costly both in terms of time and money. Automating the process with robots or other technologies will improve reliability of infrastructure.
Mind-directed-graph-Map
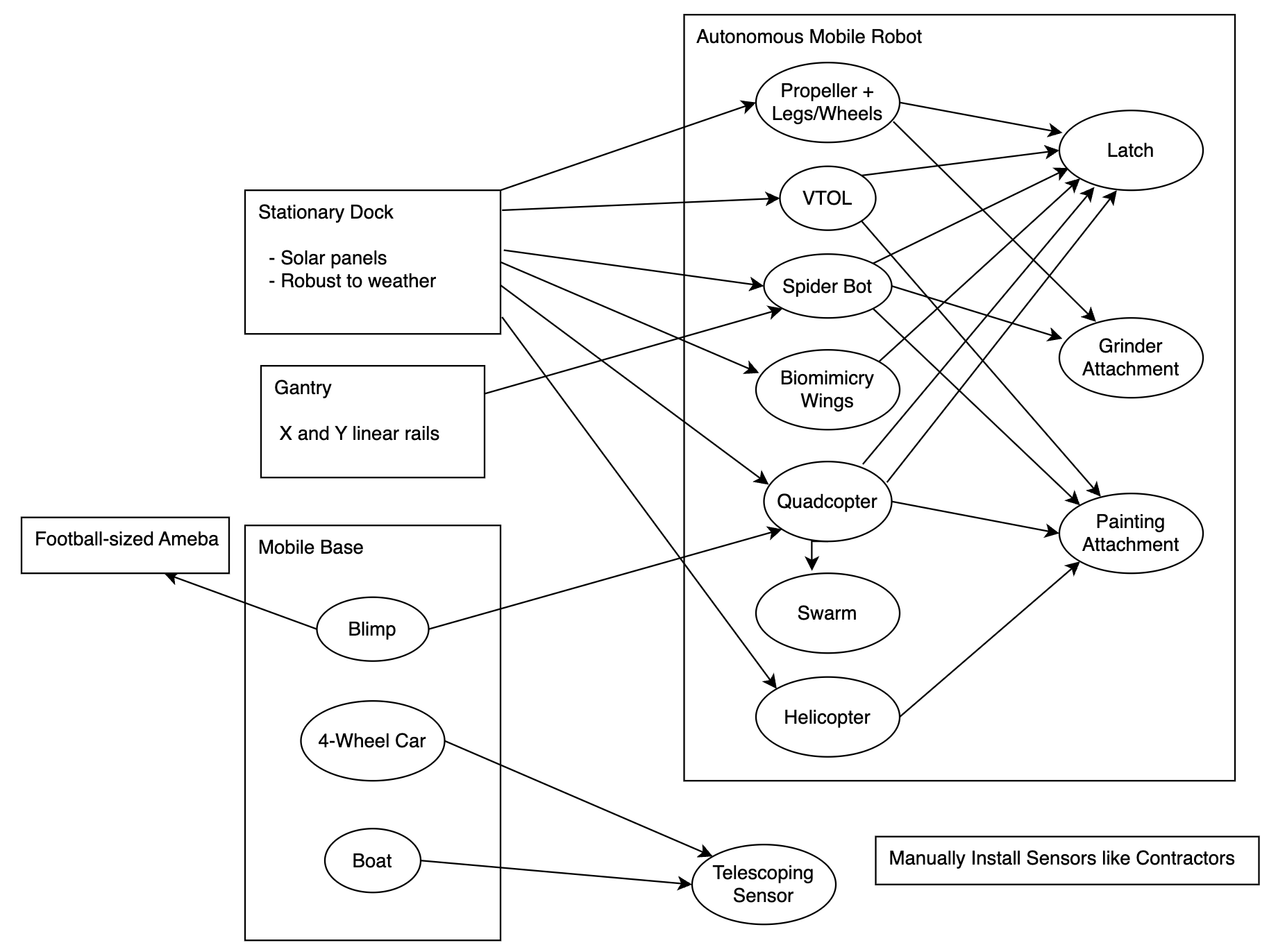
We brainstormed a variety of solutions and roughly identified the common elements in those solutions so that they can be factored out. This way all solutions are represented as a combination of those elements.
The edges are directed such that following the direction of the flow constructs a solution. For example, Stationary Dock -> Propeller + Legs/Wheels -> Latch is one such solution.
Conclusions
The team favoured the Stationary Dock -> Autonomous Mobile Robot solutions. Out of the robotic solutions, quadcopter, propeller + legs/wheels, and fixed-wing VTOL were the favourites.
Goofs of the day
- By Jove